仮想環境検証システム
Virtualized Verification into automatic Driving
ViViDは多様な条件を再現できる仮想環境シミュレータです。
自動運転/ADAS開発向けの仮想環境
自動運転/ADAS開発の課題
自動運転のシステム開発において実車ですべての交通環境を検証するためには膨大な走行試験を行わなければなりません。その試験総距離は数十億kmに及ぶとも言われています。
そこで注目されているのが実車検証の代わりに搭載するカメラやセンサ,走行環境をモデル化した仮想環境上で検証する手法です。

複雑な環境条件の組み合わせ
多様な条件を再現できる
仮想環境シミュレーション
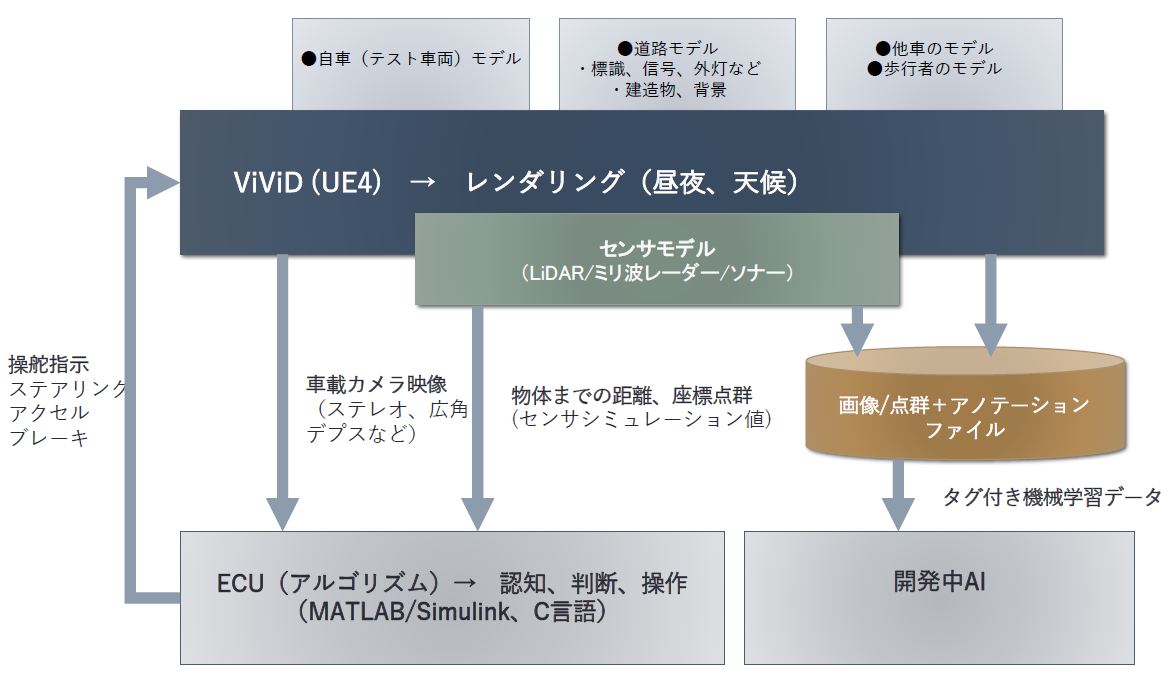
ViViDの構成
ViViDの特徴
ハイエンドゲームエンジンであるUnreal Engine4をベースにしているため、高精細な映像(画像)を出力できます。
各ユーザ向けのカスタマイズにより、コースや車両の追加、I/Fの対応、既存センサモデルの組み込みが可能です。
また、センサモデルの開発も行っています。
| 他製品 | オープンシステム | ViViD | |
|---|---|---|---|
| 高精度なカメラ映像 | ○ | △ | ◎ |
| 高速物理演算シミュレーション | ○ | △ | ○ |
| センサモデル組み込み | ○ | △ | ○ |
| センサモデル自社開発 | × | × | ◎ |
| カスタマイズ(コースやI/F) | × | × | ◎ |
| テストシナリオ(バッチ)検証 | ○ | × | ○ |
| 機械学習向けセンサデータ出力 | × | × | ◎ |
Sensor
ViViDのセンサモデル
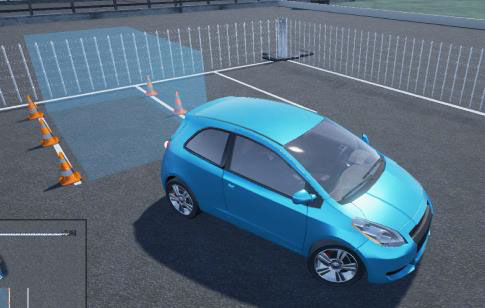
LiDAR
LiDARはレーザー光の反射により距離や方向を計測する技術で、対象物の形状も検知できます。ViViDではレイトレースによりLiDARと同等の処理を行います。また、検知状態の可視化や疑似ノイズを発生させることも可能です。
(実装例:Velodyne Lidar VLP-16/HDL-32E/HDL-64E、SICK AG、北洋電機)
ミリ波レーダー
ミリ波レーダーは波長の短い電波により対象物の位置や相対速度を計測します。太陽光や霧や雨など、気象の 影響を受けにくく、遠距離の対象物を検知できるのが利点です。
ViViDでは位置、角度、相対速度を計測します。
(実装例:Texas Instruments、Continental、Bosch)
※映像はミリ波の計測結果を可視化したものです。
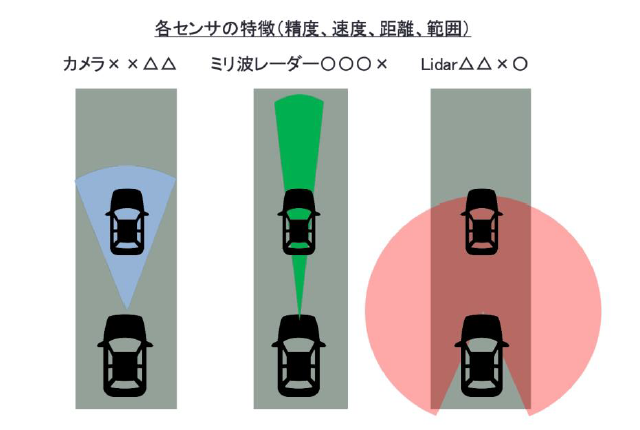
センサフュージョン
実際のセンサでは計測誤差やノイズが発生します。
また、各センサには一長一短あり、単体のセンサで性能を求めるには限界があるため、
複数のセンサを組み合わせたセンサフュージョンによりロバスト性能を確保します。
ViViDでは複数センサを同時に動作させることができ、センサフュージョンでの検証が可能です。
Environment
光環境
昼夜の変化やヘッドライト、外灯などを設定し、カメラへの太陽光の影響や
対向車のヘッドライトによる見え方などを確認できます。
照明には配光データ(IESファイル)を使用することも可能です。





走行環境
様々な道路形状(高速道路、一般道)や、標識、信号機などのオブジェクトを再現でき、
テストコースや実在の道路、架空の道路、建物や植栽など、ご要望に応じた環境を作成します。
また、障害物として他車、自転車、歩行者を登場させ、シナリオで動作させることも可能です。






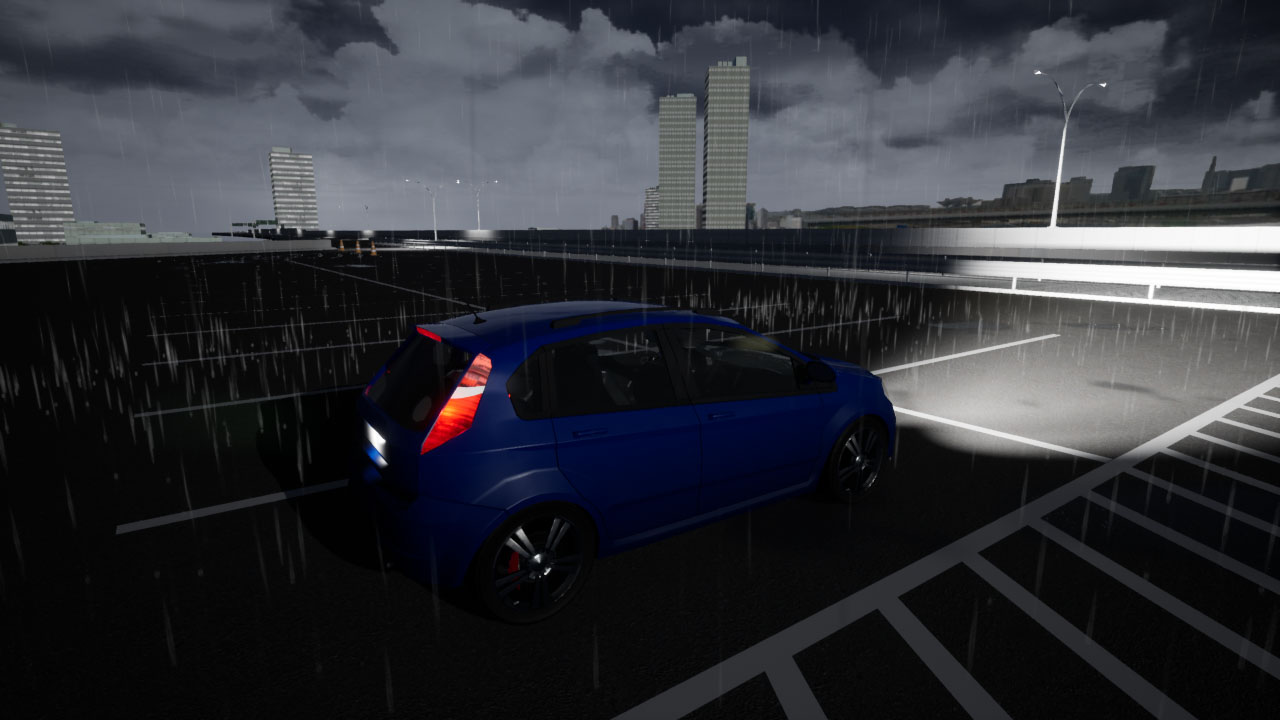
気象環境
雨や雪、霧などの気象条件を設定でき、降雨時の路面の反射や積雪時の轍もリアルに表現します。
降雨時のワイパー動作による見え方や、気象によるセンサへの影響も再現可能です。


for AI
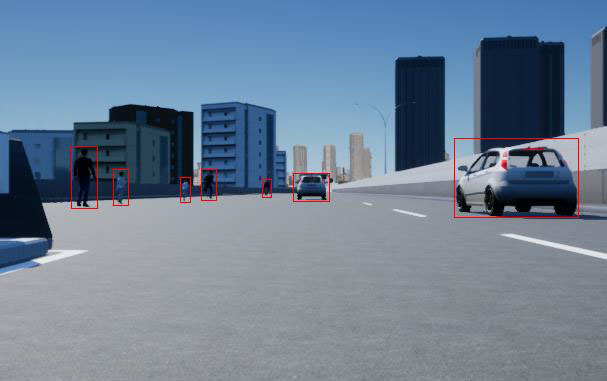
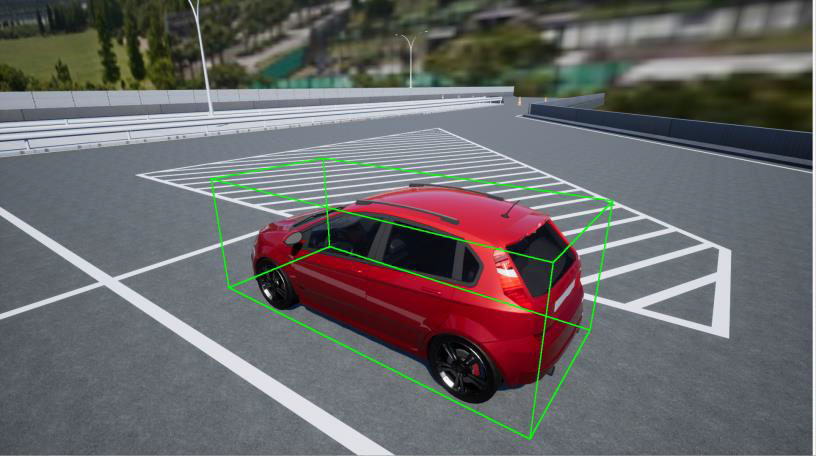
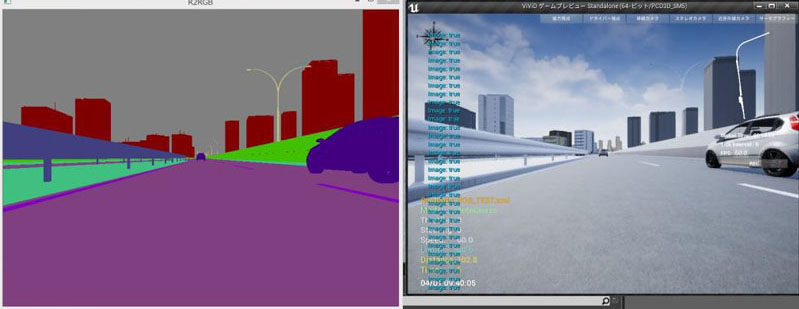
アノテーション
AIの学習には画像データと合わせて、アノテーションされたバウンディングボックス(2D/3D)や
セマンティックセグメンテーションのデータが欠かせません。
ViViDではカメラ画像と同期したアノテーションが可能で、画面に表示したり、ファイルとして出力することができます。
Function
道路モデル
実在ロケーション(高速道路、一般道、テストコース)
架空コース(走行コース簡易作成機能)
道路形状インポート(OpenDrive等)
コース環境(OpenDrive等)
テスト車両
車両3Dモデル(市販車両、特殊車両、架空車両)
ECUとのI/F(ECUへの操舵指示[アクセル、ステアリングなど])
インパネ、メーター類(HUD[色、照度、配置]など)
ヘッドライト(アクティブヘッドライト[LED色、数、位置、照射角度]など)
センサモデル(プラグイン)
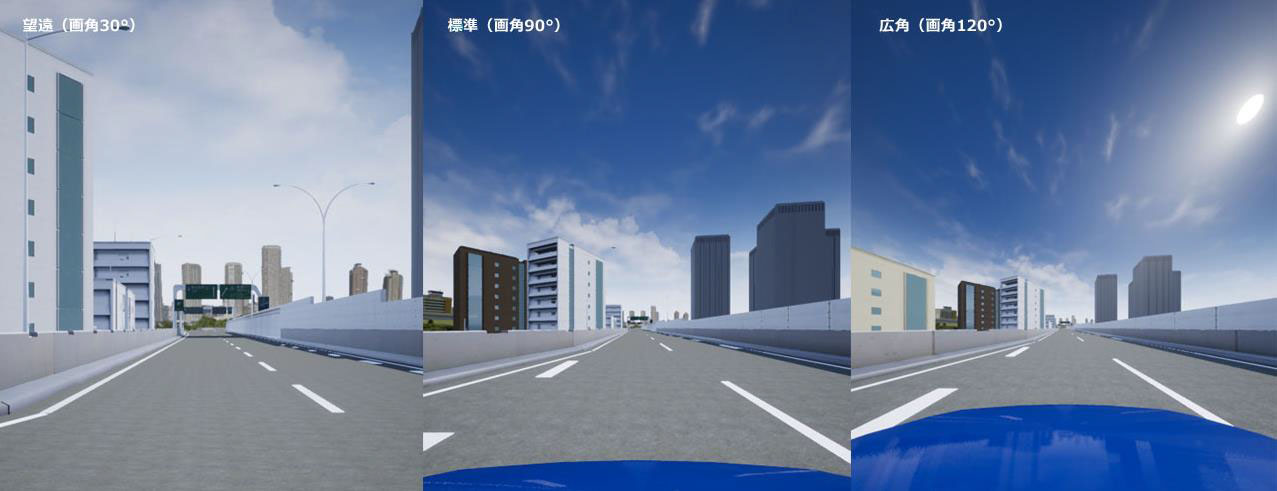
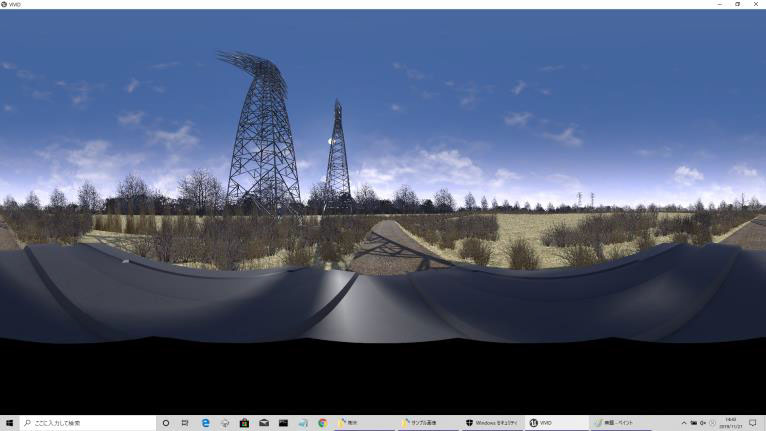
イメージセンサモデル:光学カメラ(単眼、ステレオ、広角/魚眼/全方位)
スキャナーセンサモデル(LiDAR、ミリ波レーダー、ソナー/ノイズ)
物体検知モデル(物体[他車、人間、信号、標識など]の距離、矩形パターン)
自車位置推定モデル(GPS位置情報[GNSS、速度、加速度]、LiDAR点群とダイナミックマップで自車位置推定[SLAM])
交通シミュレーション
他車両、歩行者(シナリオ機能によるテスト要件の再現)
走行環境
天候(霧、降雨[地面の濡れ反射]、降雪、積雪[轍])
時間:太陽光(太陽高度の変化による影や逆光の影響、トンネル出入り口の暗転明転)
経年変化(白線の擦れ、泥汚れ、季節による樹木変化)
照明(夜間[外灯、店舗照明、対向車のライト]の影響)